


The history of construction dates back to the Neolithic or the so-called ‘new stone age’ period of time roughly estimated to be in between from 9000BC to 5000BC. The construction materials available this time were mostly animal bones, stone, bark, bamboo, clay, line plaster, straw, and more. The construction tools used by people to cut, scrape, chop, pierce, roll, pull, leave and generally fine and customize natural materials were restricted to easily abundant tools like flake tools, axe, chopper, and Celt. The tools were basically crafted from natural materials including wood, grasses, animal bones and fibres and different types of stones along with a usual use of water for diverse purposes. This was the time when the concepts of vernacular architecture were brought to life and practice as of the continued effort of ancient human beings in search for at least better and at most innovative shelter building. The people extensively and technologically used contextually available construction materials, skills, resources, and simple but significantly meaningful designs. The origin of construction as compared to its up-to-date applications and uses greatly vary in many aspects. The developments due to the industrial revolution in the period from about 1760 to sometime between 1820 and 1840 and many other factors helped reawaken the construction sector in terms of many advancements.
The contemporary world seems dramatically changed and transformed along with its living styles in general some thousand years after the ‘new stone age’. Invention and innovation of much radical technology specific to the construction sector crucially paved a greater and benchmark way for the improvements on holistic construction efficiencies and building performances. Digital construction can be considered as a rich example to brief the fruits of the earlier noted inventions and innovations. By using and applying different digital tools to better help the betterment of delivering and operating processes in the complex built environment. Mediated Matter group, one of the media labs of the Massachusetts Institute of Technology- MIT in the US, strives to exhaustively leverage the optimistic paradigm-shifting potential in technologies by focusing on the interesting concepts of both nature-inspired design and design-inspired nature. It also inspires by introducing a face shift in construction from mechanical to intriguingly biological. The lab works to create biologically inspired and engineered design fabrication tools, technologies, and structures to enhance the intricate relations between natural and manmade environments.

Founded by Neri Oxman, the lab combines design with science and technologies while operating at the intersection of digital fabrication, computational design, material science, and synthetic biology where all basically are informed by mother nature. Neri Oxman is an American-Israeli designer and professor at MIT media lab and director of the Mediated Matter group. Neri researches art and architecture that combines design, biology, computing, and material engineering by working on the embodied sphere of environmental design and digital morphogenesis. The digital construction environment- DCE technology project by Neri is one of the architecture reasoned experiments under the Mediated Matter group at MIT. It enables technology for large scale digital manufacturing. By further developing the typical gantry-based approach to digital construction, this technology project by Neri uses robotic arm systems that believingly possess greater flexibility, dynamically expandable workspace, rapid setup times, and easier implementation ways with existing construction techniques.
This autonomous construction platform and technology is considered as a vital disruptive innovation by bringing key transformations and betterments on safety, efficiency, and most importantly speed. In addition to including a relatively swift fabrication of non-standard and modernly fashioned architectural forms, the technology encompasses onsite data gathering and real-time fabrications. The digital construction environment- DCE technology can be colossally used in disaster relief, hazardous environments and extraterrestrial exploration, and diversely more purposes. It also thriving exhibited large-scale construction with several fabrication processes walling light printing, excavation, welded-chain construction, and additive fabrication with the print-in-place process. Neri says the digital construction environment renders earth strongly more beneficial than an engineering advance through challenging the status quo on 3d printing technologies by deeply understanding the system technology not only as a causal mere printer but an entirely new way of making, efficient construction for architectural designs in this case.
Prototype Structure, an Open Dome Structure

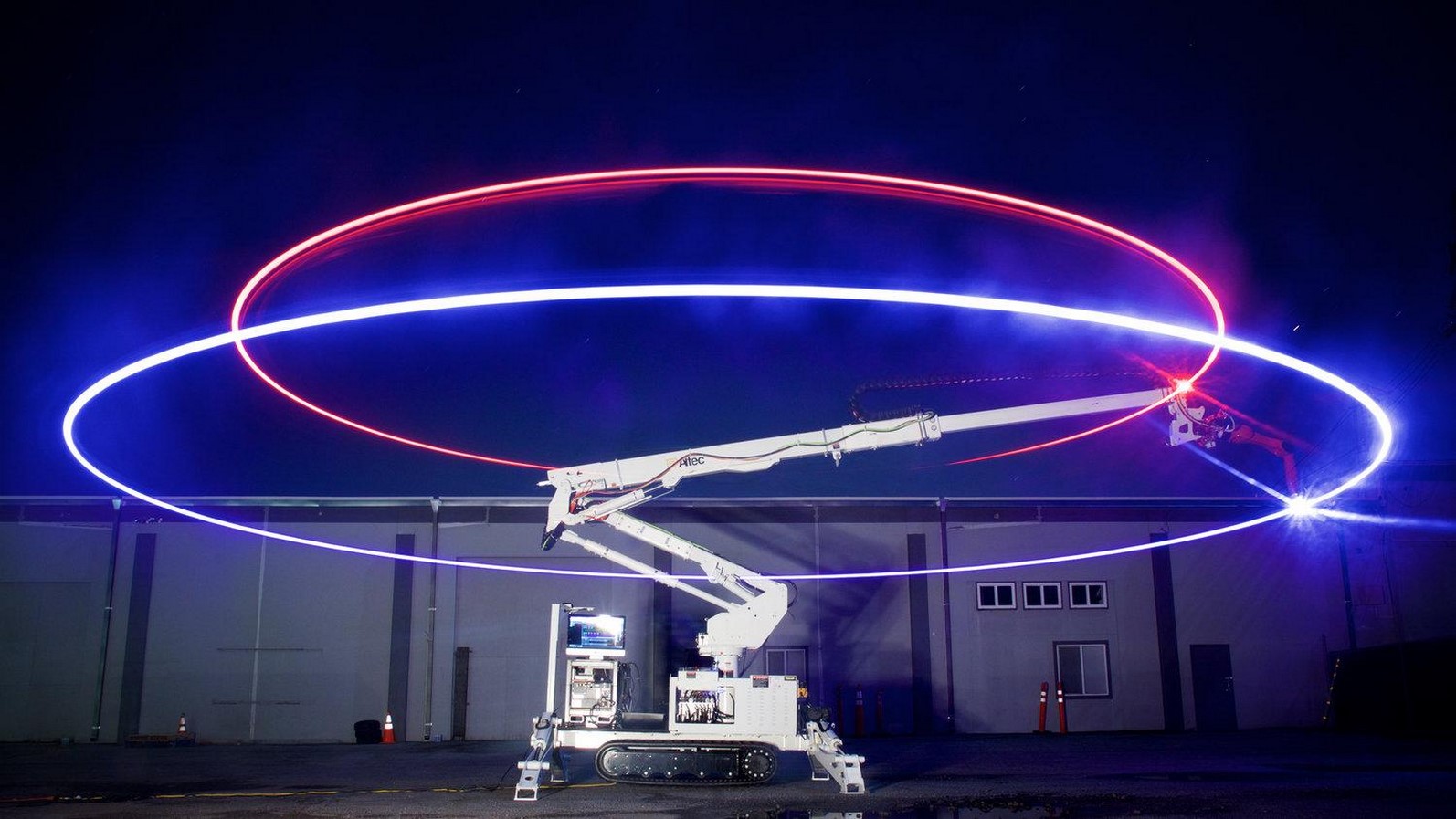
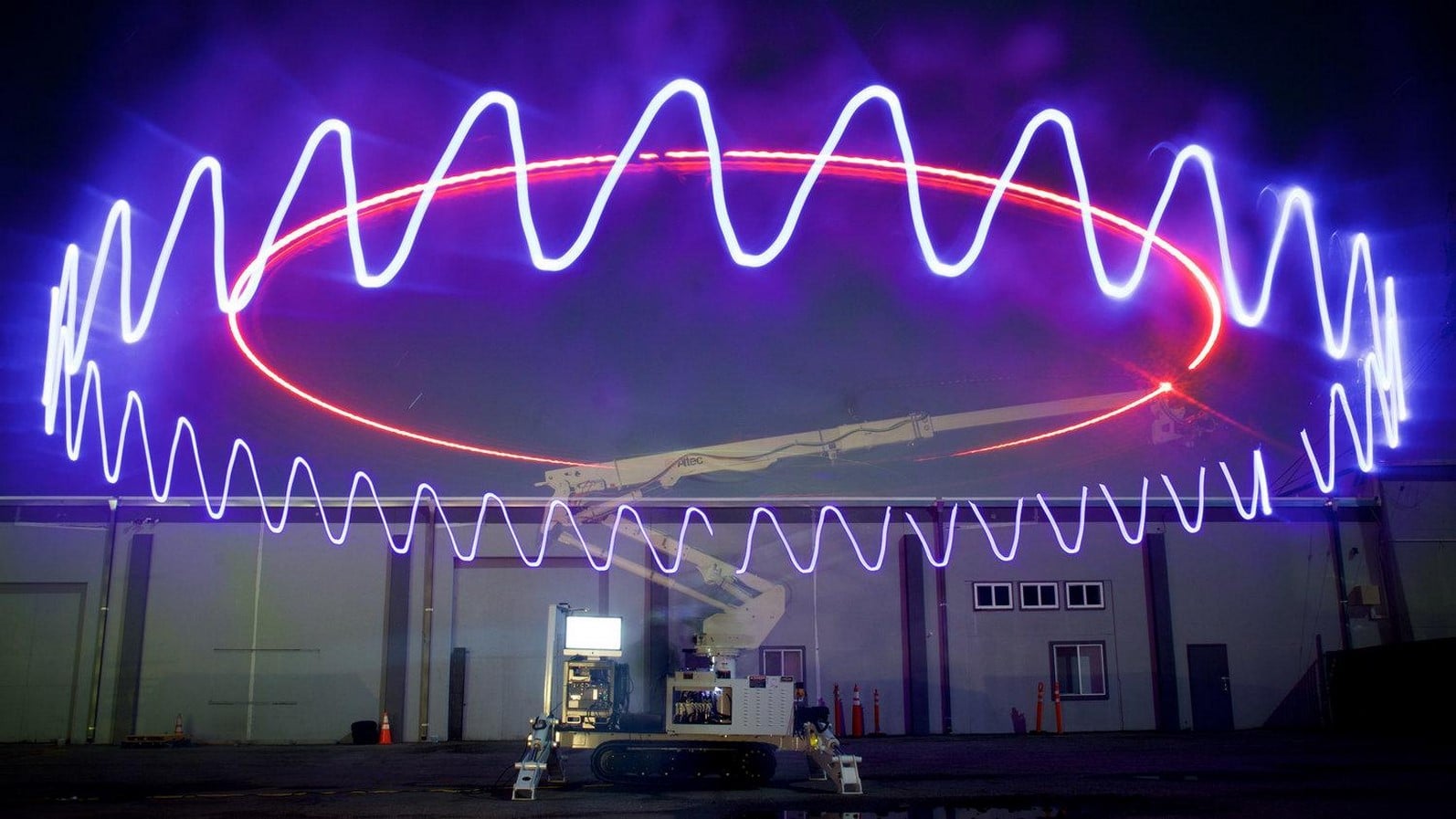
The digital construction environment platform uses 6-axis KUKA robotic arms mounted to a 5 axis altec AT40GW mobile hydraulic boom arm system which has been priced at $244,500. Aimed to akin to the biological model of human shoulder and hand, the two basic arm systems accomplish a macro-micro role of a robot architecture. The macro manipulator arm is used for gross positioning while the micromanipulator arm can option-fully maintain fine positioning, provide oscillation compensation, and improve force control bandwidth. The open dome has an area of 167.42 square meters, 14.6meters in diameter, and 3.7meters in height. The prototype is digitally constructed with the earlier introduced arm system capacitated with a radiator reach of approximately 10 meters in almost less than 13.5 hours with 0.5meters per second oscillating speed.









